第7讲:定位销的设计
第8讲:压紧的设计01
第9讲:压紧的设计02
第10讲:压紧的设计03
第11讲:菱形销的设计
第12讲:定位设计01
第13讲:定位设计02
第14讲:角座的设计
第15讲:细化01
第16讲:细化02
第17讲:细化03
第18讲:接近开关的添加
第19讲:螺丝和垫片的添加
第20讲:打开状态的制作
第21讲:对称结构的设计
第22讲:底板结构的设计
第23讲:补充讲解
赠送2:Delmia V5人机工程机器人点焊弧焊搬运涂胶(1930分钟课程)
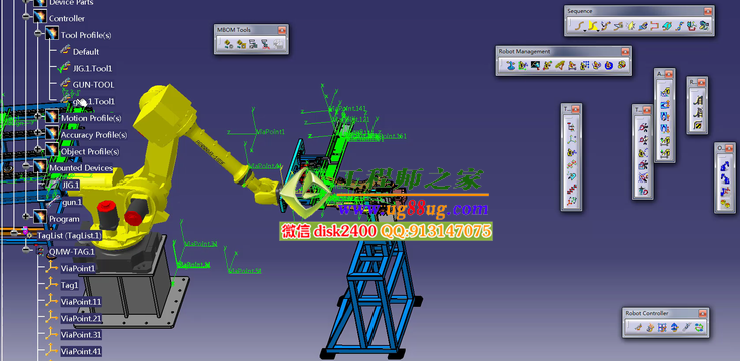
1-Delmia-工业机器人虚拟仿真
1.软件工作环境基本设置
2.X枪C枪运动机构进行建立
3.不带平衡器机器人运动机构建立
4.带平衡器机器人运动机构建立
5.码垛机器人运动机构建立
6.机器人抓手运动机构建立
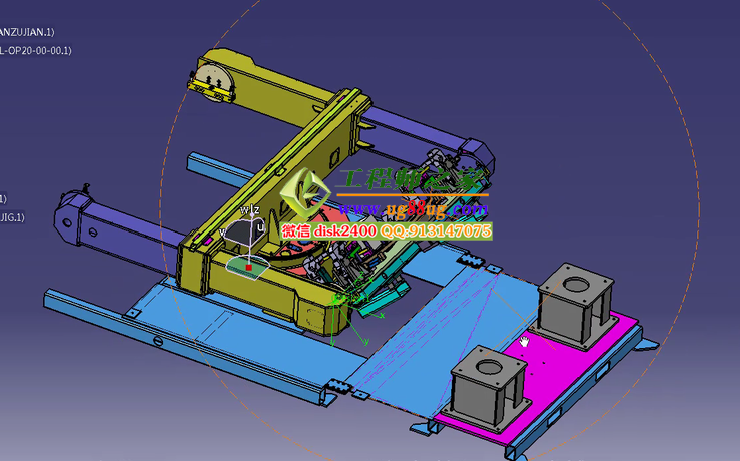
7.工装夹具运动机构建立
8.单机器人单工位机器人仿真示教
9.带有ATC切换盘装置的机器人仿真示教
10.机器人带外部轴行走轴的机器人仿真示教
11.焊接仿真过程中机器人焊枪干涉分析方法
12.机器人仿真完成后出离线及离线程序导出
13.生成布局及二维布局如何生成三维以实现仿真的方法
14.仿真数据打包发送以及加载丢失的数据方法
15.Workcell Seque-ncing 环境下工艺设置方法
16.多台机器人点焊工作空间内的干涉区分析方法
17.双机器人加外部旋转轴的弧焊仿真1
18.双机器人加外部旋转轴的弧焊仿真2
19.工业机器人搬运_涂胶仿真示教
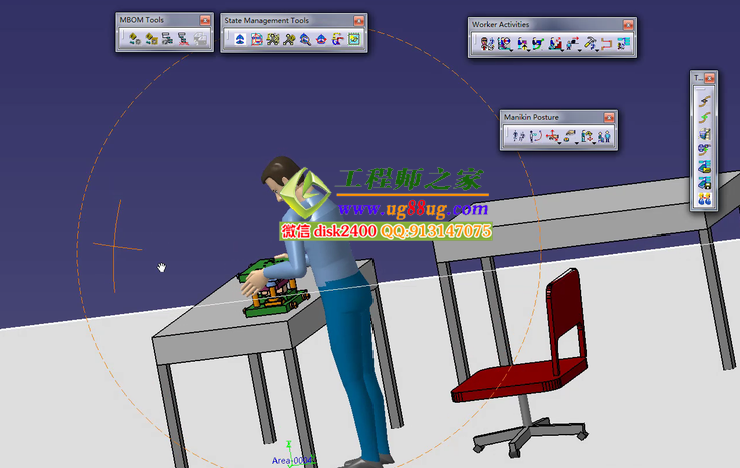
20.人机工程_人体模型创建_肢体运动_行走_搬运
21.DPM-APS模块下-物体物流运动运动的建立方法
22.如何实现手动操作机器人时部件初始能够保持-无素材
23.机床上下料子程序排序法_综合练习-无素材
24.机床上下料IO通信法_综合练习-1
24.机床上下料IO通信法_综合练习-2
25.点焊弧焊带外部轴工作站综合仿真实战-无素材
26.8机器人点焊自动化生产线思路点评-学员项目无素材提供
27.机器人搬运板件在固定焊枪上焊接仿真示教方法
2-Delmia人机工程部分
基础界面介绍及设置
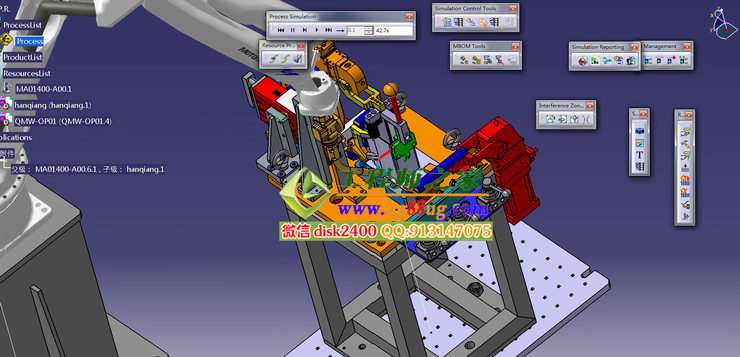
DPMassembiy processsimulation各命令讲解及实例演练1
DPMassembiy processsimulation各命令讲解及实例演练2
DPMassembiy processsimulation各命令讲解及实例演练3
DPMassembiy processsimulation各命令讲解及实例演练4
DPMassembiy processsimulation各命令讲解及实例演练5
DPMassembiy processsimulation各命令讲解及实例演练6
DPMassembiy processsimulation各命令讲解及实例演练7
human task simulation功能讲解及实例演练1
human task simulation功能讲解及实例演练2
human task simulation功能讲解及实例演练3
human task simulation功能讲解及实例演练4
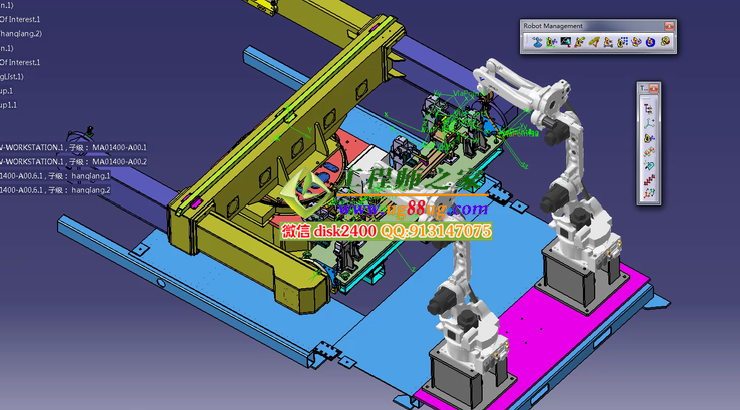
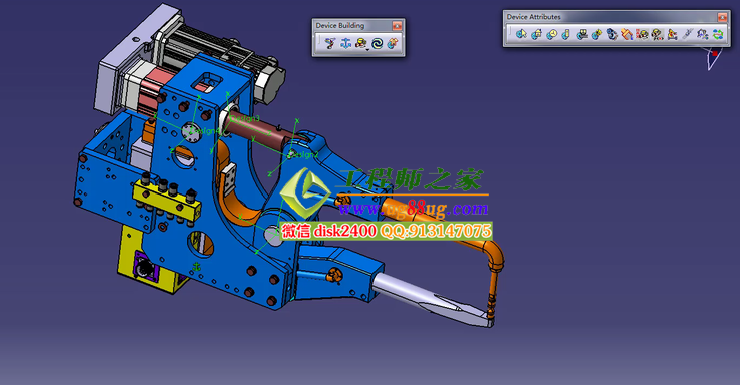
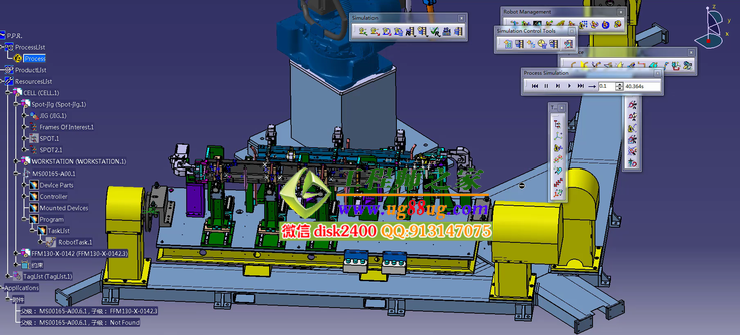
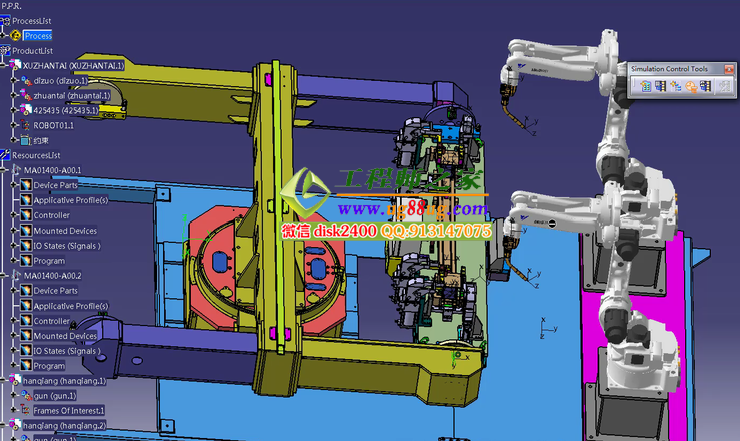
本套视频教程内容截图如下:
---------------------------------------------------------------------------------------------
购买方式:
百度云盘下载购买流程:
(1).请先注册本站会员,然后提交订单,在配送方式选择网盘下载
(2).下单后可以用微信或者支付宝付款,如不方便填写地址信息,可以直接扫描下面
微信或者支付宝的二维码.
(3).付款后请联系QQ客服913147075,截下付款记录给客服,客服会提供百度云盘下载链接。


---------------------------------------------------------------------------------------------
联系方式 :
QQ:913147075(技术支持)
E-Mail:913147075@qq.com
网站:http://www.ug88ug.com/
手机:13437429443
---------------------------------------------------------------------------------------------