|
内容介绍:
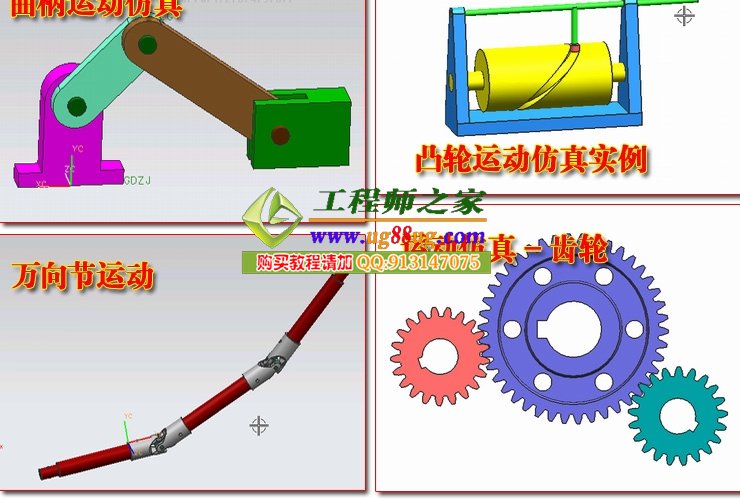
本套课程为多年机械设计的工程师主讲,以UGNX8.0为工具,详细介绍UG NX 8.0
运动仿真模块各命令,在每个命令详细讲解后,都有两三个相关的应用案例讲解。本
教学视频共三十四节课,共精选了60多个实例,讲述典型机构运动仿真设计的知识与
操作技能。通过60多个机构运动仿真实例的训练,只要有基本的建模能力的学习者,
即可掌握应用UG NX 8.0进行机构运动仿真的设计和操作技能。
1.赠送UG8.0 安装软件一套
2.赠送唐老师主讲的机构运动仿真一套
分钟课程,两套合计,共20小时的培训课程。
全套教程包括赠送的UG8.0安装软件,共11.3G容量,发货为3张DVD光盘。
1.UG8.0机构运动仿真内容介绍
第一节、 NX8.0运动仿真模块简介
第二节、NX8.0运动仿真基础命令讲解一
1.1、运动学(Kinematics)
1.2、动力学(Dynamics)
2.1、创建连杆
2.2、连杆质量特性
第三节、NX8.0运动仿真基础命令讲解二
1.1、运动副的定义
1.2、运动副的类型
1.3、创建运动副的步骤
1.4、运动副的啮合连杆操作
2.1、Gruebler数决定因素
2.2、Gruebler数的近似意义
2.3、Gruebler数的三种情况
2.4、关于Gruebler数的建议
第四节、旋转副讲解
1.1、旋转副的运动特征
1.2、旋转副的摩擦设置
1.3、摩擦材料接触参数
1.4、旋转副实例讲解
第五节、滑动副讲解
1.1、滑动副的运动特征
1.2、滑动副的案例讲解
第六节、柱面副讲解
1.1、柱面副的运动特征
1.2、柱面副的驱动设置
1.3、柱面副的案例讲解
第七节、螺旋副讲解
1.1、螺旋副的运动特征
1.2、螺旋副的驱动设置
1.3、螺旋副的案例讲解
第八节、万向节讲解
1.1、万向节的运动特征
1.2、万向节的设置注意事项
1.3、万向节的案例讲解
第九节、球面副讲解
1.1、球面副的运动特征
1.2、球面副的设置注意事项
1.3、球面副的案例讲解
第十节、平面副讲解
1.1、平面副的运动特征
1.2、平面副的设置注意事项
1.3、平面副的案例讲解
第十一节、固定副讲解
1.1、固定副的运动特征
1.2、固定副的设置操作
第十二节、等速万向节讲解
1.1、等速万向节的运动特征
1.2、等速万向节的设置注意事项
1.3、等速万向节的案例讲解
第十三节、基础运动副讲解
1.1、共点、共线、共面、方向、平行
和垂直运动副
1.2、基础运动副实例讲解
第十四节、齿轮副讲解
1.1、齿轮副的运动特征
1.2、齿轮副的操作设置
1.3、齿轮副实例讲解
第十五节、齿轮齿条副讲解
1.1、齿轮齿条副的运动特征
1.2、齿轮齿条副的操作设置
1.3、齿轮齿条副实例讲解
第十六节、线缆副讲解
1.1、线缆副的运动特征
1.2、线缆副的操作设置
1.3、线缆副实例讲解
第十七节、2-3传动副讲解
1.1、2-3传动副的运动特征
1.2、2-3传动副的操作设置
1.3、2-3传动副实例讲解
第十八节、点在线上讲解
1.1、点在线上的运动特征
1.2、点在线上的操作设置
1.3、点在线上实例讲解
第十九节、线在线上讲解
1.1、线在线上的运动特征
1.2、线在线上的操作设置
1.3、线在线上实例讲解
第二十节、点在曲面上讲解
1.1、点在曲面上的运动特征
1.2、点在曲面上的操作设置
1.3、点在曲面上实例讲解
第二十一节、弹簧讲解
1.1、弹簧的一般特征
1.2、拉簧
1.3、扭簧
1.4、连杆方式创建弹簧
1.5、滑动副方式创建弹簧
1.6、旋转副方式创建弹簧
1.7、创建动画的方式创建柔性弹簧
第二十二节、阻尼讲解
1.1、阻尼的一般特征
1.2、拉伸阻尼
1.3、旋转阻尼
1.4、阻尼实例讲解
第二十三节、衬套讲解
1.1、衬套的一般特征
1.2、常规衬套
1.3、圆柱衬套
1.4、圆柱衬套的运动类型
1.5、衬套实例讲解
第二十四节、3D接触讲解
1.1、3D接触的一般特征
1.2、在RecurDyn求解器中,实体3D接触
1.3、在ADAMS求解器中,3D接触
1.4、3D接触设置注意事项
1.5、3D接触实例讲解
第二十五节、2D接触讲解
1.1、2D接触的一般特征
1.2、2D接触实例讲解
第二十六节、标量力讲解
1.1、标量力的一般特征
1.2、标量力的设置注意事项
1.3、标量力实例讲解
第二十七节、矢量力讲解
1.1、分量方式定义矢量力
1.2、幅值和方向方式定义矢量力
1.3、矢量力的设置注意事项
1.4、矢量力实例讲解
第二十八节、标量扭矩讲解
1.1、标量扭矩的创建
1.2、标量扭矩实例讲解
第二十九节、矢量扭矩讲解
1.1、矢量扭矩的创建
1.2、穿件矢量扭矩的要点
1.3、矢量扭矩实例讲解
第三十节、运动驱动—恒定驱动讲解
1.1、恒定驱动介绍
1.2、恒定驱动实例讲解
第三十一节、运动驱动—简谐驱动讲解
1.1、简谐驱动介绍
1.2、简谐驱动实例讲解
第三十二节、运动驱动—函数驱动讲解
1.1、函数驱动介绍
1.2、函数驱动实例讲解
第三十三节、运动驱动—铰接运动驱动讲解
1.1、铰接运动驱动介绍
1.2、铰接运动驱动实例讲解
第三十四节、运动驱动—电动机驱动讲解
1.1、电动机驱动介绍
1.2、PMDC电动机讲解
1.3、信号讲解
1.4、电动机驱动实例讲解
UG8.0机构运动仿真内容截图
UG7.0机构运动仿真内容介绍(唐老师主讲)

买家必读
(1).本产品为语音视频教程,发货为DVD,如需VCD请先联系!
(2).本站发货首选快递发货,快递到不了的地方,一律发EMS.邮费都是实价收取,请勿议价.
(3).本产品DVD碟片只能在电脑上播放,不能在VCD影碟机上播放.
(4).本产品发货前都会做过检测,保证百分百能使用.收到货后如果发现光盘损坏请在24小
时内通知本店,本店可再递一份。邮费将由本店承担。
---------------------------------------------------------------------------------------------
发货方式:
广东省内:支持货到付款,上午发货,下午收到;下午发货,第二天上午收到;
外省: 省外一律款到发货(银行转帐成功后,立即通知我们核实)核实后12小时内快递发货,2-4天收到,
偏远地区:偏远地区用EMS发货
邮资说明:(以下邮资为1公斤以下计算)
平邮:全国15元
EMS:全国25元
快递:新疆,西藏,宁夏20元,全国其它地方15元.
---------------------------------------------------------------------------------------------
付款方式:
(1)本店所有商品支持支付宝交易,要支付宝交易,请与我们联系。
(2)珠三角地区支持到付(将钱交给送货员即可)
(3)银行账号:6227 0032 3432 0039 428账户名:黄景兰
(4)如果是新手请参阅购物流程图
---------------------------------------------------------------------------------------------
联系方式 :
QQ:913147075(技术支持)
QQ群:64702868
E-Mail:disk400@sina.com
网站:http://www.ug88ug.com/
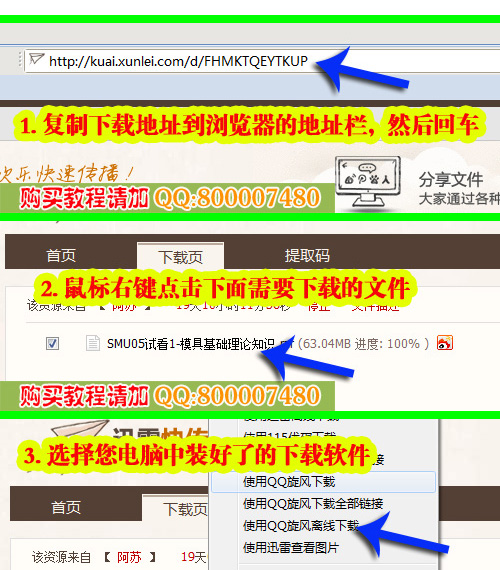
下载方法1:
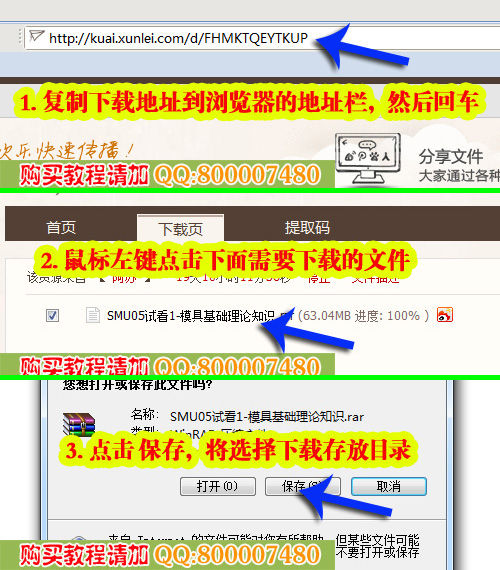
下载方法2: